Page 14 - Fister jr., Iztok, Andrej Brodnik, Matjaž Krnc and Iztok Fister (eds.). StuCoSReC. Proceedings of the 2019 6th Student Computer Science Research Conference. Koper: University of Primorska Press, 2019
P. 14
nsmit data on a 10 MHz Amateur Radio band [4]. Passive Floating Probe
The international project Argo is an initiative that uses inner sensors Case energy
thousands of battery-powered floats around the world to subsystem
measure the temperature, salinity, and velocity of the ocean GSI Gear Box (Medium)
currents. The floats collect data by staying submerged un- 1554U2GYCL
derwater and transmit data by coming up to the surface
and sending it via a satellite antenna. As of this writing, communication Microcontroller image capture
the project has 3869 floats active across all the oceans [5]. subsystem STM32L476xx and processing
The main difference between the outlined design and other hatch with data storage
similar projects is the presence of a Geiger counter, a gas outer sensors subsystem
sensor, a microphone 1, a camera 2, and the use of a more ca-
pable additional microcomputer system in the form of Rasp- Figure 1: Subsystems are shown in rectangles. The
berry Pi for processing extensive data and ease of develop- microcontroller synchronizes the work of all the sen-
ment of such processing software. sors. The case is not part of any subsystem, since it
is a passive element and therefore not controlled by
3. PROPOSED DESIGN the microcontroller.
This section outlines the design of the probe, the software, Data storage
and the communication between them. Because the pro- subsystem
posed design is not necessarily final, minor changes can hap-
pen to individual modules while components are sourced. Data storage
micro SDHC 16GB
3.1 Hardware design
KINGSTON
For its operation, the probe must accomplish different tasks.
Modules that contribute to the same task are classified into Micro SD card adapter
a subsystem. All proposed subsystems are shown in Fig. 1. MicroSD card
Modules inside these subsystems will be presented later.
breakout board+
The core of the probe will be a SensiBLE SIMBA-PRO
development board. Besides various sensors, which are in- Figure 2: Modules in the data subsystem
cluded in the inner sensors subsystem, it will feature an
STM32L476xx microcontroller with an ARM Cortex M-4 m dicate that the watertight case is damaged). Other sensors
processor. The microcontroller will retrieve data from the can detect and measure outside sources (GPS signal, Beta
sensors and send them to the data storage subsystem. The and Gamma radioactive rays, sound, vibration, and light –
most critical data will be sent to our server daily using the since the case is transparent).
communication subsystem. When the system has access to
enough power, advanced operations, such as image capture, The outer sensor subsystem shown in Fig. 4 consists of sen-
sound recording, and advanced data processing will be exe- sors that cannot perceive outside environmental changes from
cuted on an external Raspberry Pi module (which is part of the interior of the airtight probe. As such they are places
the image capture and processing subsystem).
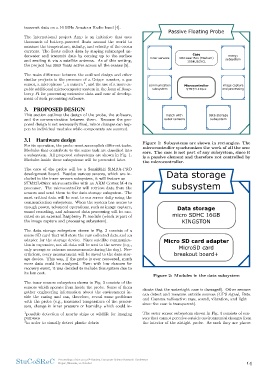
The data storage subsystem shown in Fig. 2 consists of a
micro SD card that will store the raw collected data and an
adapter for the storage device. Since satellite communica-
tion is expensive, not all data will be sent to the server (e.g.,
only average or extreme measurements during the day). Nev-
ertheless, every measurement will be saved to the data stor-
age device. This way, if the probe is ever recovered, much
more data could be analyzed. Even with low chances for
recovery event, it was decided to include this system due to
its low cost.
The inner sensors subsystem shown in Fig. 3 consists of the
sensors which operate from inside the probe. Some of them
gather engineering information about the environment in-
side the casing and can, therefore, reveal some problems
with the probe (e.g., increased temperature of the proces-
sors, change in inner pressure or humidity which could in-
1possible detection of nearby ships or wildlife for imaging
purpuses
2in order to visually detect plastic debris
StuCoSReC Proceedings of the 2019 6th Student Computer Science Research Conference 14
Koper, Slovenia, 10 October
The international project Argo is an initiative that uses inner sensors Case energy
thousands of battery-powered floats around the world to subsystem
measure the temperature, salinity, and velocity of the ocean GSI Gear Box (Medium)
currents. The floats collect data by staying submerged un- 1554U2GYCL
derwater and transmit data by coming up to the surface
and sending it via a satellite antenna. As of this writing, communication Microcontroller image capture
the project has 3869 floats active across all the oceans [5]. subsystem STM32L476xx and processing
The main difference between the outlined design and other hatch with data storage
similar projects is the presence of a Geiger counter, a gas outer sensors subsystem
sensor, a microphone 1, a camera 2, and the use of a more ca-
pable additional microcomputer system in the form of Rasp- Figure 1: Subsystems are shown in rectangles. The
berry Pi for processing extensive data and ease of develop- microcontroller synchronizes the work of all the sen-
ment of such processing software. sors. The case is not part of any subsystem, since it
is a passive element and therefore not controlled by
3. PROPOSED DESIGN the microcontroller.
This section outlines the design of the probe, the software, Data storage
and the communication between them. Because the pro- subsystem
posed design is not necessarily final, minor changes can hap-
pen to individual modules while components are sourced. Data storage
micro SDHC 16GB
3.1 Hardware design
KINGSTON
For its operation, the probe must accomplish different tasks.
Modules that contribute to the same task are classified into Micro SD card adapter
a subsystem. All proposed subsystems are shown in Fig. 1. MicroSD card
Modules inside these subsystems will be presented later.
breakout board+
The core of the probe will be a SensiBLE SIMBA-PRO
development board. Besides various sensors, which are in- Figure 2: Modules in the data subsystem
cluded in the inner sensors subsystem, it will feature an
STM32L476xx microcontroller with an ARM Cortex M-4 m dicate that the watertight case is damaged). Other sensors
processor. The microcontroller will retrieve data from the can detect and measure outside sources (GPS signal, Beta
sensors and send them to the data storage subsystem. The and Gamma radioactive rays, sound, vibration, and light –
most critical data will be sent to our server daily using the since the case is transparent).
communication subsystem. When the system has access to
enough power, advanced operations, such as image capture, The outer sensor subsystem shown in Fig. 4 consists of sen-
sound recording, and advanced data processing will be exe- sors that cannot perceive outside environmental changes from
cuted on an external Raspberry Pi module (which is part of the interior of the airtight probe. As such they are places
the image capture and processing subsystem).
The data storage subsystem shown in Fig. 2 consists of a
micro SD card that will store the raw collected data and an
adapter for the storage device. Since satellite communica-
tion is expensive, not all data will be sent to the server (e.g.,
only average or extreme measurements during the day). Nev-
ertheless, every measurement will be saved to the data stor-
age device. This way, if the probe is ever recovered, much
more data could be analyzed. Even with low chances for
recovery event, it was decided to include this system due to
its low cost.
The inner sensors subsystem shown in Fig. 3 consists of the
sensors which operate from inside the probe. Some of them
gather engineering information about the environment in-
side the casing and can, therefore, reveal some problems
with the probe (e.g., increased temperature of the proces-
sors, change in inner pressure or humidity which could in-
1possible detection of nearby ships or wildlife for imaging
purpuses
2in order to visually detect plastic debris
StuCoSReC Proceedings of the 2019 6th Student Computer Science Research Conference 14
Koper, Slovenia, 10 October